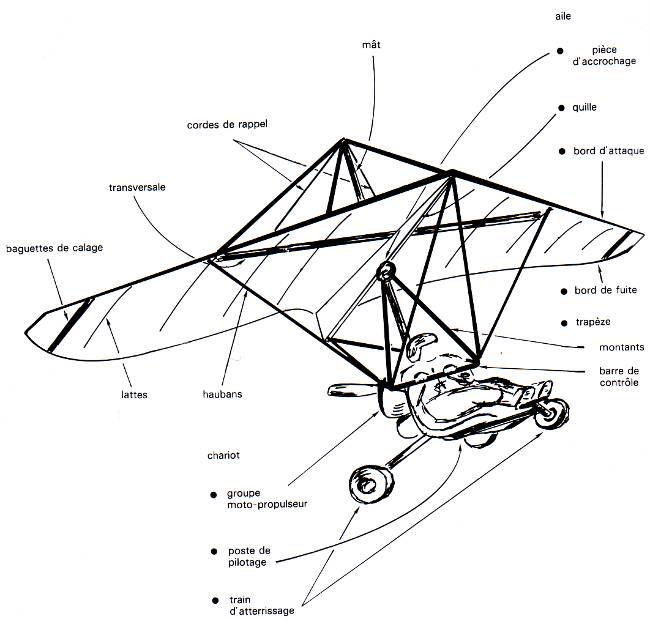
<= Notes sur les pratiques techniques
- Tubes en alliage d'aluminium assemblés par visserie
- haubanage de rigidification
- voile de type rogalo cousue et rigidifiée par des lattes. Elles sont actuellement le plus souvent à double surface
- éventuellement: composite fibre + résine pour cage de pilotage ou aile

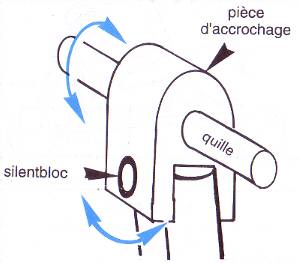
- Articulation d'accrochage aile/chariot: elle autorise le débattement sur les axes de tangage et de roulis. Le silent-bloc assure une certaine souplesse selon l'axe de lacet.

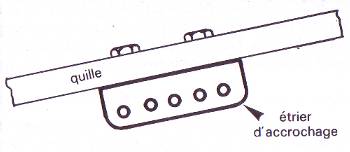
Etrier d'accrochage:
- Réglage de l'aile: bien respecter l'angle dièdre et le vrillage (stabilité)
- Place de l'hélice et du GMP: elle a une influence sur le couple traction/trainée et donc sur l'équilibre
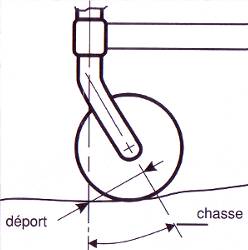
- Roue directrice: la géométrie de l'articulation doit respecter une valeur de chasse pour que lors du roulage l'orientation de la roue conserve une stabilité suffisante:
- carénage du poste de pilotage: diminution de la traînée
- flotteurs: pour atterrir et décoller sur un plan d'eau. La traînée est augmentée
- skis pour atterrir et décoller sur des surfaces enneigées
- Passage de l'hélice: laisser au minimum 10cm entre le bout de pale et toute partie de l'aile pouvant l'approcher (incertitude due aux vibrations, flexions, etc.)
- Pleines possibilités de débattement de l'aile:
- la position médiane doit correspondre à l'assiette correcte de l'aile par rapport au chariot
- il doit exister un débattement suffisant entre la barre de contrôle et les jambes du pilote
- Assiette du chariot: le plan d'appui des trois roues doit faire un angle avec le plan horizontal si on pend le chariot avec pilote et essence à un palan. Cela est nécessaire pour qu'à l'atterrissage le contact avec le sol se fasse dabord par les roues arrières
- Positions d'accrochage sur le pendulaire: elle est réglée au moyen d'un étrier d'accrochage. Il existe une plage de centrage admissible:
- limite avant dépassée: appareil non maniable
- limite arrière dépassée: appareil instable
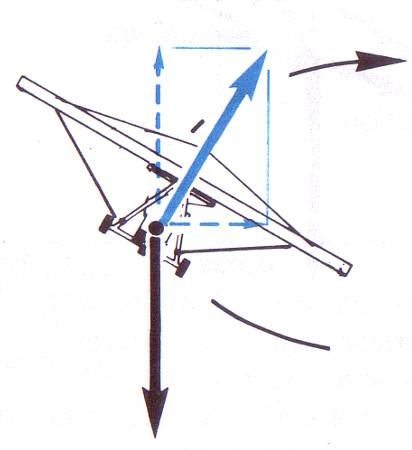
Équilibre: le chariot se déplace pour mettre le poids aligné avec la portance, en roulis et en tangage. L'équilibre en lacet se réalise naturellement du fait de la symètrie de l'appareil.
Point d'accrochage:
- trop en avant: appareil piqueur, vitesse trapèze laché trop rapide
- trop en arrière: appareil cabreur, vitesse trapèze laché trop lente
- une augmentation de puissance tend à faire cabrer et monter
- une diminution de puissance tend à faire piquer et descendre
Stabilité en roulis: les ULM actuels sont neutre spirale. On peut avoir:
- stable spirale: l'ULM se redresse tout seul, on doit toujours avoir une action sur la barre
- neutre spirale: l'ULM évolue en virage commande au neutre
- instable spirale: l'ULM serre de plus en plus le virage sans action sur la barre de contrôle
- facteurs augmentant l'inclinaison:
- effet girouette
- roulis induit par le lacet
- Facteurs diminuant l'inclinaison:
- effet dièdre
- amortissement de lacet
D'une manière générale la stabilité en roulis est améliorée par l'angle dièdre et la flèche.
Stabilité en lacet: Les ULM pendulaires sont stables en lacet, c'est à dire qu'ils ont tendance à orienter leur nez dans le lit du vent relatif. Cet effet est indispensable aux virages
Cette stabilité est améliorée par:
- angle dièdre
- flèche
- poche de quille
- lobes de la voilure
Parking: pour un pendulaire on met l'aile basse au vent. Pour un parking prolongé on peut éventuellement la démonter et la mettre à plat sur le sol.
Roulage: Nos aéronefs de faibles masses sont sensibles au vent. On doit rouler à la vitesse d'un homme au pas, pour pouvoir s'arrêter rapidement et soulager la structure, surtout sur des pistes en herbes qui peuvent être assez irrégulières. Il faut toujours naturellement veiller à ne pas souffler sur n'importe quoi ou n'importe qui. En pendulaire la régle est de garder l'aile à plat ou extrados légèrement exposé au vent. L'aile devient déporteuse et s'oppose ainsi au déplacement.
Nota: pour avoir de faibles rayons de virages au sol il est utile de tourner au vent.
Décollage: Utiliser une bande roulable suffisamment longue, sensiblement face au vent et à une trouée d'envol acceptable.
Distance de décollage: elle varie beaucoup selon (cf. manuel de vol):
- la puissance du moteur
- l'état du sol
- la température
- l'altitude
- le poids embarqué: elle augmente avec la charge alaire
- la force et la direction du vent: elle diminue vent de face
- la pente de la piste
Étapes du décollage:
1- Mise en puissance:
- lorsqu'on est en roue libre elle doit être progressive
- freins bloqués, on peut utiliser la pleine puissance dessuite, avec une accélération plus franche et une distance de roulage plus courte
3- Envol: à la vitesse de décollage, on pousse la barre pour décoller. La roulette avant se soulève, puis les roues arrières. On laisse ensuite la barre revenir au neutre.
4- Montée: la montée initiale se termine aprés franchissement du dernier obstacle pénalisant. On peut adopter les différents types de montées (cf. infra)
Cas d'un vent de travers:
- au début du roulage l'aile est en dérapage (forces aérodynamiques faibles)
- quand l'aile est sustenté ce sont les roues qui ont tendance à déraper
- au début on roule au vent quand les forces aérodynamiques sont faibles
- ensuite on prend la piste en travers face au vent en mettant en puissance progressivement
- aprés décollage si nécessaire on ajuste pour suivre la piste
Vol en palier: équilibre stable avec inclinaison nulle (i.e. l'appareil ne pivote pas sur lui même)
- la portance équilibre le poids
- la traction équilibre la trainée
- vitesse:
- Plus on va vite plus l'incidence est faible
- moins on va vite plus l'incidence est forte
- effort à cabrer: vitesse faible
- aucun effort: vitesse de croisière
- effort à piquer: vitesse élevée
Vol en montée: le poids admet une composante qui s'ajoute à la traînée. On augmente donc la traction en augmentant le régime moteur. Le paramètre à maintenir constant est la vitesse.
Montée normale: il s'agit du meilleur compromis entre performances en montée, refroidissement du moteur et puissance
- puissance maximale
- vitesse de croisière
- puissance maximale
- vitesse de vol légèrement inférieure à la vitesse de croisière
- puissance maximale
- vitesse de vol indiquée dans le manuel de vol
- vitesse faible donc risque de décrochage
- risque de surchauffe du moteur
- à proscrire en atmosphère turbulente
Tumbling: phénomène typique des pendulaires.
- En montée l'assiette est trés importante. Au fur et à mesure que la vitesse décroît le pilote augmente l'assiette pour maintenir la portance.
- Au décrochage l'ailé crée un couple à piquer qui la fait pivoter, pendant que le chariot aura un mouvement de bascule vers l'arrière du à son poids. La portance n'équilibrant plus le poids l'ULM descend et le vent relatif vient du bas
- Cherchant une nouvelle incidence compatible avec le vol par rapport à ce nouveau vent relatif, l'aile culbute vers l'avant, emmagasinant beaucoup d'énergie cinètique, accentué par le faible amortissement en tangage des ailes deltas.
- il y a alors passage sur le dos avec le plus souvent destruction de l'aile
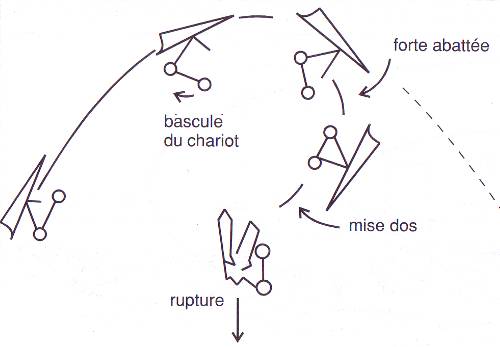
- en montée si l'on sent un décrochage, maintenir fermement la barre de contrôle
- lors d'un tumbling effectif la seule chance de salut est de déployer le parachute de secours
- éviter les réductions brutales de puissances sur une pente à grande montée
Vol en descente: le poids admet une composante qui s'ajoute à la traction.
- réduction de puissance => maintient d'une vitesse constante
- maintien de la puissance => on doit tirer la barre. On a une augmentation de vitesse
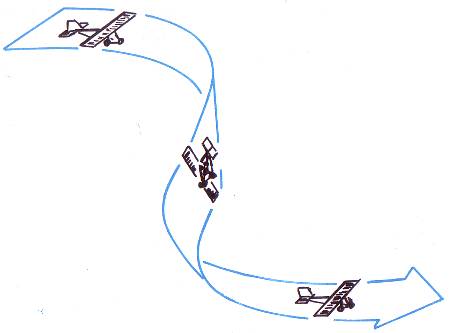
Virage: on doit incliner l'aile vers l'intérieur du virage pour avoir une composante centripète de la portance. Pour un virage à droite (resp. à gauche) on a une action du trapéze à gauche (resp. à droite). Une fois l'inclinaison voulue atteinte on remet la barre au neutre (les ailes deltas modernes sont neutres-spirales)
La portance nécessaire est plus grande qu'en palier, donc:
- soit on augmente l'incidence (pousser sur la barre), mais dans ce cas cela augmente aussi la trainée et il est nécessaire d'augmenter un peu la puissance
- soit on se contente d'augmenter la puissance
Pour revenir en palier, on pousse la barre dans le sens inverse du virage jusqu'à revenir à inclinaison nulle.
Limitation: la vitesse de décrochage en virage est supèrieure à la vitesse de décrochage en vol rectiligne. En effet pour une vitesse donnée plus l'inclinaison est forte plus l'incidence est forte. L'inclinaison maximum est donc celle correspondant à l'incidence de décrochage.
Il existe aussi une limite d'inclinaison au delà de laquelle le virage stabilisé en palier est mécaniquement impossible, avec glissade importante et/ou piqué et/ou décrochage, avec perte de hauteur importante => attention à faible hauteur
=> avant de virer on adopte une vitesse assurant une certaine marge de sécurité par rapport à la vitesse de décrochage à l'inclinaison escomptée
=> adopter une marge de sécurité encore plus importante en atmosphère turbulente
Symétrie de vol: elle est nécessaire car le vol dérapé détériore l'aérodynamique. Ce phénomène est d'autant plus marqué que l'incidence est forte, donc à grande inclinaison ou à faible vitesse. On la matérialise par un brin de laine placé en dehors des perturbations aérodynamiques et du champs d'influence de l'hélice. Sur les pendulaires il y a toujours un léger dérapage (qu'on ne peut contrôler d'ailleurs du fait de l'absence de gouverne de direction).
Facteur de charge: Il indique de combien est multiplié le poids apparent (Addition de la force centrifuge due au virage au poids). Il augmente avec l'inclinaison. Le facteur de charge est limité par la résistance structurale de l'appareil.
Roulis induit: la partie de l'aile extérieure au virage décrit une trajectoire plus longue que la partie intérieure, sa vitesse et donc sa portance est plus importante et elle tend à se soulever. Sur certains appareils cela nécessite d'agir faiblement et de façon permanente sur le trapèze vers l'intérieur du virage
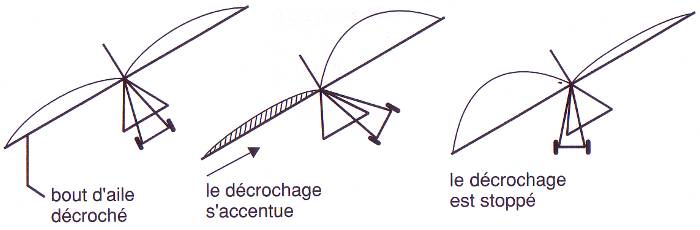
Décrochage en virage: En ULM existe une grande différence d'incidence locale à grande inclinaison (voilure souple). L'aile du coté intérieur décroche en premier. Si le pilote essai de contrer le déplacement du lobe augmentera encore l'incidence sur l'aile intérieure. Si le pilote déplace la barre du coté du virage, comme pour l'accompagner, le déplacement du lobe diminuera l'incidence de l'aile intérieure et pourra annuler le décrochage:
Spirale engagée: lors d'une inclinaison trop forte l'appareil s'engage dans une spirale de plus en plus serrée avec une vitesse croissante et un taux de chute important
=> cf. manuel de vol
Autorotation: une incidence trop forte et un dérapage important peut entraîner une autorotation avec fort dérapage et taux de chute important
=> cf. manuel de vol
Atterrissage:
1-approche: évolutions permettant d'accorder son éloignement au terrain et sa hauteur/sol. On effectue un tour de piste:
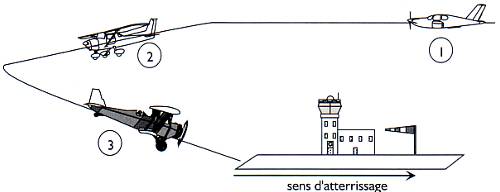
- vent arrière
- étape de base
- finale
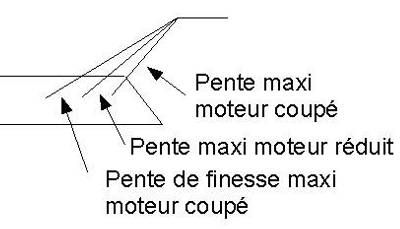
Aprés le dernier virage on choisit comme repère un point de visée sur le terrain et on estime la pente de la droite qui nous relie à ce point. Elle doit être supérieure ou égale à la finesse moteur coupé. On choisit ce point en fonction des obstacles et des éventuels emcombrements de la piste.
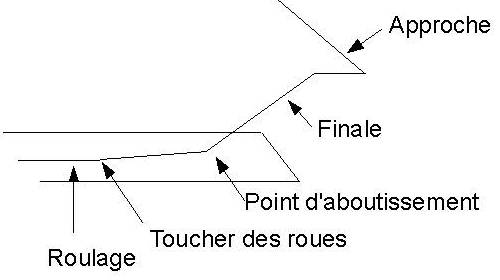
2- entrée en finale et finale:
but:
- appareil sur l'axe de la piste
- appareil sur la pente choisie
- appareil à une hauteur suffisante en entrée
- traverser sans encombre turbulences et gradient
- avoir une vitesse de sécurité suffisante par rapport au décrochage
- le point qui semble immobile à un instant donné matérialise le point d'aboutissement de la trajectoire. On est correct si, la piste grossisant, le point d'aboutissement choisi est toujours au même niveau par rapport à un repère.
- si le point de visée monte on est trop court. On remet alors momentanément les gaz et on diminue le piqué.
- si le point de visée descend c'est que l'on est trop long. On réduit l'incidence (piqué), en faisant attention à ne pas trop accélérer
- si on est trop en dehors du pinceau de tolérance, on remet les gaz et on recommence l'approche
La finale se fait à une vitesse sensiblement plus élevée que la vitesse de croisière moteur coupé. On adopte la Vitesse Optimale d'Approche (VOA), qui peut être majoré en cas de vent fort ou de turbulences
Attention:
- être doux avec les réductions et mise de gaz car les moteurs 2T risquent de s'étouffer si elles sont brutales
- éviter d'être trop bas lors du dernier virage
Effet du gradient: l'ULM subit une succession de rafales arrières, donc la vitesse/air diminue, l'incidence augmente, et la vitesse/sol augmente. Les performances sont dégradées.
3- arrondi: le but est de mettre l'ULM en contact avec le sol et l'arrêter sur une distance compatible avec la longueur de la piste disponible. Pour cela:
- inclinaison nulle pour ne pas dévier latéralement lors de l'augmentation d'incidence et ne pas risquer d'accrocher un bout d'aile au sol.
- alignement de la roulette de direction bien dans l'axe et position des pieds solide sur le palonnier, sans freiner avec le pied. Le frein de parking s'il existe est bien desserré.
- on regarde vers l'avant pour bien apprécier la hauteur
- prés du sol on augmente l'incidence, et donc la vitesse diminue
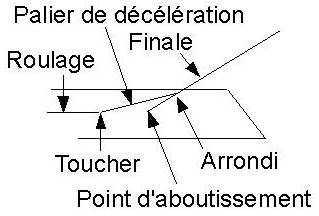
- un excédent de vitesse est absorbé par la phase de décélération, laquelle se trouve juste rallongée.
- un défaut de vitesse peut faire s'enfoncer l'ULM avec variation d'assiette rapide et atterrissage dur
incidents lors de l'arrondi:
- Arrondi effectué trop haut: il faut arrêter l'augmentation d'incidence et attendre de se rapprocher du sol pour poursuivre la manoeuvre. Il faut éviter une action à piquer.
- Arrondi effectué de façon trop rapide: l'ULM va remonter. Il faut arrêter l'augmentation d'incidence et éviter une action à piquer. On attend de se rapprocher naturellement du sol pour poursuivre la manoeuvre.
- ne pas couper le contact alors que le moteur tourne à un régime élevé ou en accélération, attendre la stabilisation du régime moteur au ralenti
- Couper le circuit des bougies pour éviter tout risque de retour de l'hélice suite à une manipulation intempestive de l'hélice ou du démarreur
- couper l'arrivée d'essence
Parachute de secours: ll doit être choisit en fonction du poids total admissible donné par le constructeur, au point du vue résistance du parachute et vitesse de descente. Le transport et le stockage doit se faire dans un endroit propre et aéré, le parachute en nylon craignant le soleil et l'humidité.
- à l'ouverture penser à couper le moteur, puis suivre les indications du fabriquant
- pendant la descente couper le contact et l'arrivée d'essence, stabiliser si possible l'appareil
- observer le point de chute. Si une action sur la trajectoire est possible, essayer de viser une zone de forêt ou de broussailles pour amortir le choc
